Initial Matlab Commands (before running Simulink):
% clear matlab memory and close all figures clear all; close all; % define motor parameters L = 1e-3; R = 1; J = 5e-5; B = 1e-4; K = 0.1; % define motor state variable model A = [-R/L, 0, -K/L; 0, 0, 1; K/J, 0, -B/J]; B = [1/L; 0; 0]; C = [0, 1, 0]; D = [0]; % check observability O = obsv(A,C); rank(O) % design observer by placing poles of A-LC at -500+j250, -500-j250, -200 Lt = acker(A.',C.',[-500+250j, -500-250j, -2000]); L = Lt.' % check poles of estimator-error dynamics est_poles = eig(A - L*C) % redefine C,D to get all states out of DC motor block - % use only y = x_2 for observer C = [1, 0, 0; 0, 1, 0; 0, 0, 1]; D = [0; 0; 0]; % define DC motor intial conditions for use in Simulink x0 = [0, 0, 0]; % define estimator state variable model and initial conditions Ahat = A; Bhat = [B, L]; Chat = [1, 0, 0; 0, 1, 0; 0, 0, 1]; Dhat = [0, 0; 0, 0; 0, 0]; xhat0 = [5, 5, 5];
Matlab Response:
ans =
3
L =
56450
1998
108504
est_poles =
1.0e+003 *
-0.5000 + 0.2500i
-0.5000 - 0.2500i
-2.0000
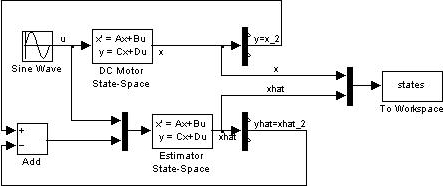
Simulink File
Matlab Plot Commands (after Simulink):
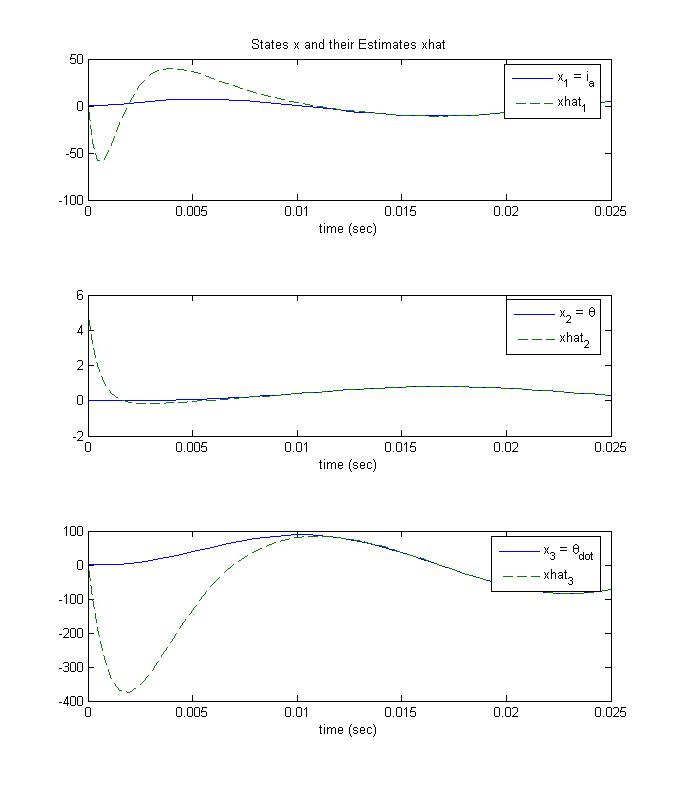
figure(1);
subplot(3,1,1); plot(tout, states(:,1), tout, states(:,4), '--');
xlabel('time (sec)'); legend('x_1 = i_a', 'xhat_1');
title('States x and their Estimates xhat');
subplot(3,1,2); plot(tout, states(:,2), tout, states(:,5), '--');
xlabel('time (sec)'); legend('x_2 = \theta', 'xhat_2');
subplot(3,1,3); plot(tout, states(:,3), tout, states(:,6), '--');
xlabel('time (sec)'); legend('x_3 = \theta_{dot}', 'xhat_3');
Plots Generated: