


Next: Lab Part I: FM
Up: Frequency Modulation and Demodulation
Previous: Frequency Modulation and Demodulation
Subsections
In angle modulation, the amplitude of the signal is held constant and the phase is being varied with the message. An angle modulated signal is of the form:
 |
(1) |
The instantaneous phase of  is given by
is given by
 |
(2) |
and the instantaneous frequency is given by
 |
(3) |
Using this approach, if the message is proportional to  , which is the phase deviation, then we have phase modulation. If the message is proportional to
, which is the phase deviation, then we have phase modulation. If the message is proportional to
 , which is the frequency deviation, then we have frequency modulation.
, which is the frequency deviation, then we have frequency modulation.
In order to have phase modulation,
 |
(4) |
where  is known as the deviation constant. For frequency modulation,
is known as the deviation constant. For frequency modulation,
 |
(5) |
where  is known as the frequency deviation constant. Consequently, an FM modulated signal is of the form
is known as the frequency deviation constant. Consequently, an FM modulated signal is of the form
 |
(6) |
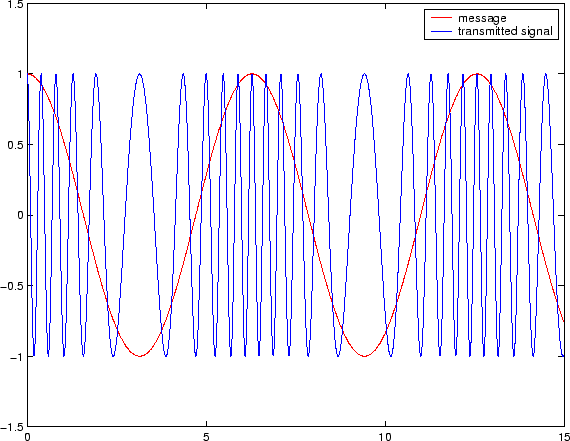
An FM signal is shown in Figure 1
Figure 1:
Frequency modulation
 |
There are several ways to demodulate an FM signal. In this lab you will use a differentiator followed by an AM detector do demodulate and FM signal as shown in Figure 2
Figure 2:
Frequency discriminator
 |
In order to implement the above the frequency discriminator, we need to
design a differentiator. One way to implement a differentiator is using an
optimal equiripple linear-phase FIR filter. This filter is optimal because
the weighted approximation error between the desired frequency response and
the actual frequency response is spread evenly across the passband and
evenly across the stopband. This results in minimizing the maximum error.
Remez algorithm may be used to generate this filter. Below are
samples of the output generated using the firpm function.
Figure 3:
Magnitude repines FIR equiripple differentiator for  to
to 
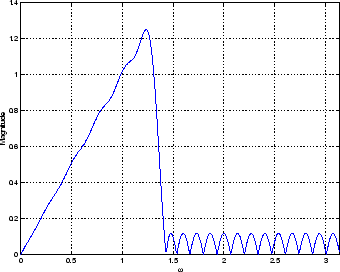 |
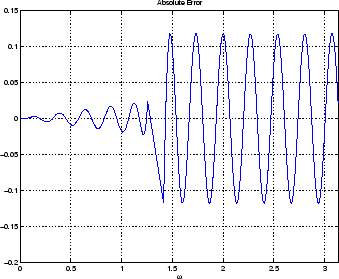
Figure 4:
Absolute error of an FIR equiripple differentiator for to
 |
Next: Lab Part I: FM
Up: Frequency Modulation and Demodulation
Previous: Frequency Modulation and Demodulation
Copyright © 2004, Aly El-Osery
Last Modified 2006-11-06